SIRIUS Lab
Surgical & Intelligent Robot & Innovative Unmanned Systems Laboratory
SIRIUS Lab focuses on the intersection of artificial intelligence, robotics, and embodied intelligence. We design
learning-enabled robotic algorithms and platforms for robot
perception, reasoning, and dexterous manipulations. Our research aims to enable robots to
understand dynamic environments, reason with multimodal information, and interact safely and skillfully with the
physical world. By combining surgical data science, foundation models, and robot learning,
SIRIUS Lab aims to advance the next generation of trustworthy, general-purpose robotic intelligence.
We have openings for postdocs, research assistants and visiting students. Please email us if you're interested!
News
- [06/2026] Two papers were accepted at MICCAI 2026!
- [06/2026] One paper was accepted at IROS 2026!
- [04/2026] Two papers were accepted at ICML 2026!
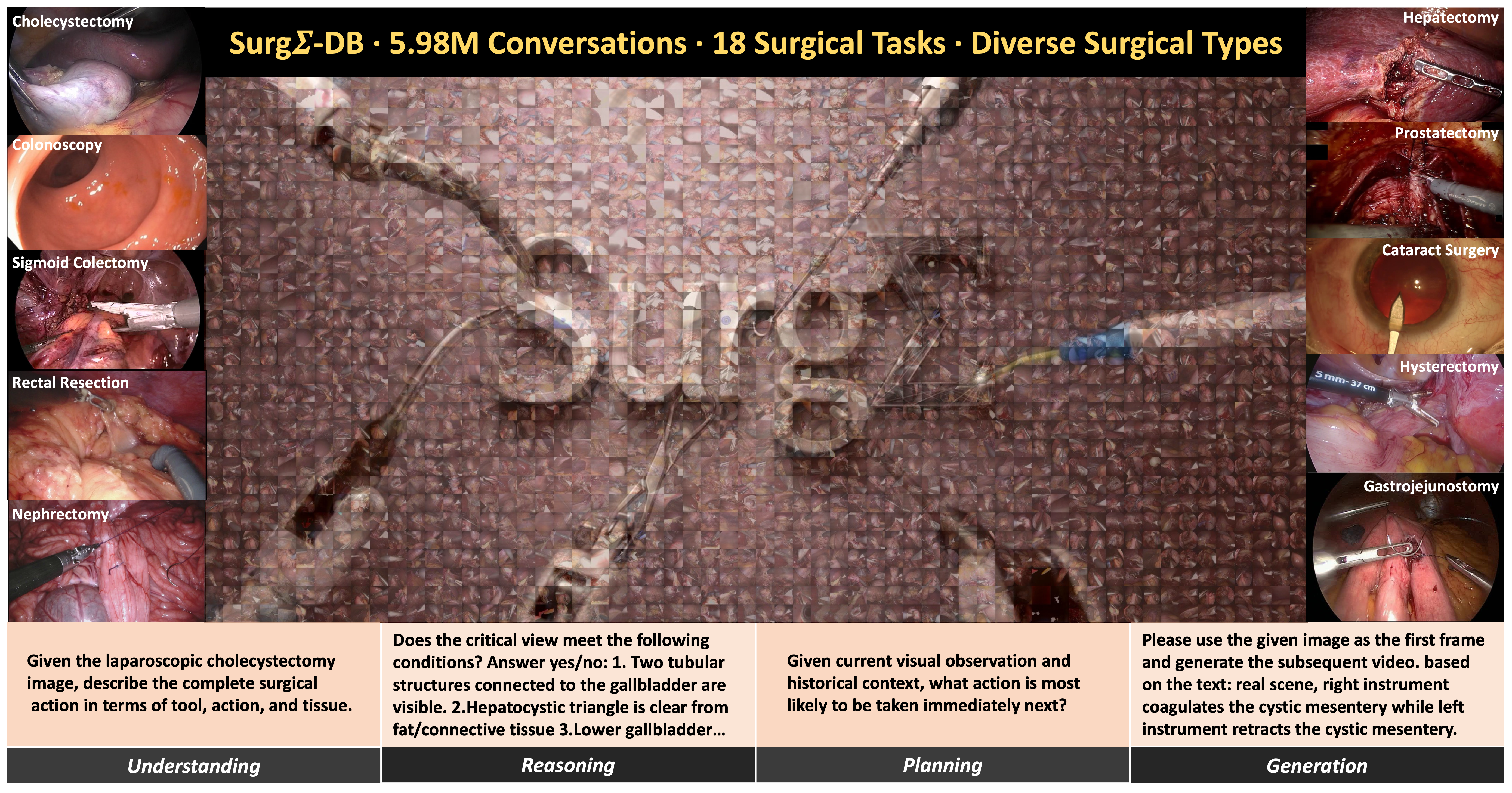
- [03/2026] We are co-organizing the data initiative of the SurgΣ project! Check out the GitHub repo.
- [03/2026] Our new surgical foundation model Surg-R1 is now online!
- [01/2026] One paper was accepted at ICLR 2026!
- [01/2026] Two papers were accepted at ICRA 2026!
- [12/2025] One paper was accepted at NPJ Digital Surgery!
- [09/2025] One paper was accepted at NeurIPS 2025!
- [03/2025] We are co-organizing COLAS workshop at MICCAI 2025!
- [03/2025] One paper was accepted at IEEE ISBI 2025!
- [02/2025] One paper was accepted at ICRA 2025!
- [05/2024] One paper was accepted at ICML 2024!
- [05/2024] One paper was accepted at ICRA 2024!
- [05/2024] One paper was accepted at Machine Learning.
- [07/2023] One paper was accepted at IEEE TMI!
- [01/2023] One paper was accepted at Surgical Endoscopy!
- [01/2022] One paper was accepted at IEEE TPAMI!
Research ( show selected / show all by date / show all by topic )
Research Highlight
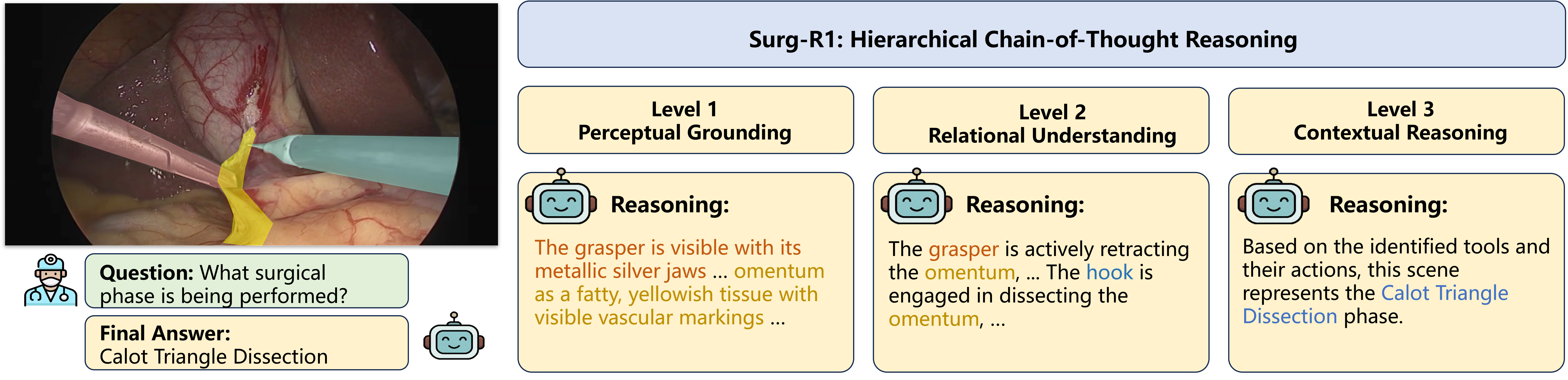
Surg-R1: A Multimodal Foundation Model with Hierarchical Reasoning for Interpretable Decision Support
Surgical AI /
Robot Perception /
Robotic Learning
(* / †: indicates equal contribution.)
(* / †: indicates equal contribution.)
Generalizable Coarse-to-Fine Robot Manipulation via Language-Aligned 3D Keypoints
International Conference on Learning Representations (ICLR), 2026
[paper]